式中,Lav和Lmin分别为平均亮度和最小亮度。
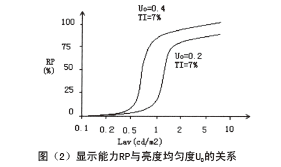
一般来说,路面的亮度均匀度不得低于0.4。从图(2)中可以看出,在相同的阈值增量下,即使路面的平均亮度相同,但若路面均匀度越低,则显示能力越小。
考虑到视觉舒适性,即使道路照明达到良好的整体均匀度,如果道路上连续出现明显的亮带和暗带,即俗称的“斑马线效应”,也会造成驾驶员的眼睛不停地调节适应,从而容易造成视觉疲劳。CIE引入了纵向均匀度概念,是指对在车道中间轴线上面对交通车流方向观察的观察者而言的最小亮度与最大亮度的比值,为U1=Lmin/Lmax (3)车道纵向均匀度的要求要比全路面均匀度高。
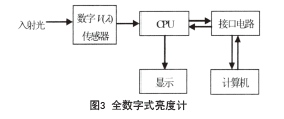
三、亮度计(1)XYL-Ⅲ型全数字亮度计采用数字V(λ)传感器,以全数字亮度信号检测系统替代原有的模拟信号检测系统。改变了以模拟信号检测方法为基础的原有亮度计,由于应用了数字技术,该仪器不产生零点漂移,并应用计算机软件定标,系统稳定性高。其结构原理如图3所示:
(2)XYL-Ⅲ型全数字亮度计特性:
● 动态范围:0.1-100,000cd/m2;● 仪器精度:优于±5%;● 分辨率:0.001 cd/m2;● 重复性:0.001 cd/m2;● 数字V(λ)传感器光谱响应达国家一级标准;● 温度系数:-0.1%/℃;● 刷新频率:3次/s(≥1cd/m2),1次/2s(<1cd/m2);● 全量程测量,无换档误差;● 3-1/2位LCD显示;● RS232接口,可用于计算机远程监控;● 具有保持功能;● 供电电源:9V电池;● 主机尺寸:135L×72W×33H(mm)。
仪器外形如图4所示:

四、道路照明的亮度测量1、测量地段的选择和布点方法(1)测量地段的选择:选择测量地段时,应从灯具的间距、亮度、悬挑、仰角等的安装规整性及光源的一致性等方面选择有代表性的路段。
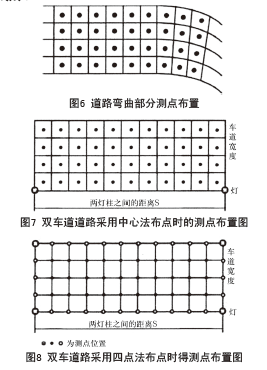
亮度测量的范围,在纵方向(沿道路走向)应包括同一侧的两个灯杆之间的区域;而在横方向,单侧布灯时应为整个路宽;双侧交错布灯、对称布灯或中心布灯时可为1/2路宽。
(2)布点方法:布点方法有四点法和中心法两种。
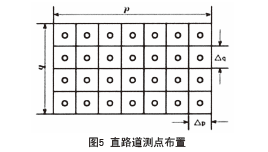
1)四点法:把同一侧两灯柱间的测量路段分成若干个大小相等的矩形网格,把测点设置在每个矩形网格的四角,图8为四点法布点时的测点布置图。
2)中心法:把同一侧两灯柱间的测量路段划分成若干个大小相等的矩形网格,把测点设在网格中心。图7为中心法布点时的测点布置图。
当路面亮度均匀度比较差或对测量精度要求比较高时,划分的网格数应多一些,即测点布得密一些。
当两灯柱的间距S≤50m时,通常沿道路纵方向把间距S分成10等分;当S>50m时,按每一网格边长≤5m的原则进行等间距划分,而在道路横方向把每条车道二等分(四点法)或三等分(中心法)。当路面亮度均匀度比较好或对测量精确度要求比较低时,则在道路的横方向可取车道的宽度作为网格的宽度而不需要再划分。
2、道路水平平均亮度及其均匀度的计算(1)按四点法布点的计算:若M为纵方向划分的网格数,N为横方向划分的网格数,则M·N为总网格数。根据每个网格四个角上四个测点的亮度平均值Lav可代表该网格的假定亮度值,则Lav的计算式为:
式中LΘ——图8测量区四个角测点的亮度;L○——图8除四个角处四条外边上测点的亮度;L●——图8测量区四个外边以内测点的亮度。
(2)按中心布点法计算:按中心布点法测量亮度时,路面平均亮度按式(2)计算。
式中Lav——路面的平均亮度,Lx;Li——每个测量点的亮度值,Lx;n——测点数。
测点数越多,得到的平均值越精确,不过也相应地增加了工作量。
(3)亮度总均匀度的计算。路面亮度均匀度U是路面上最小亮度Lmin与平均亮度Lav之比,即Lav按式(1)或(2)计算,Lmin为测点中亮度最低点的测量值,在规则布点的测点上测得的亮度中找出。
3、测量条件、方法和测量记录(1)测量条件1)根据需要,点燃必要的光源,排除其他无关光源的影响。
2)测量亮度时应待光源的光输出稳定后再进行测量。因此,测量开始前,若是白炽灯,需燃点5min;若是荧光灯,需燃点15min;若是高强气体放电灯,则需燃点30min。对于新安装的照明系统,宜在燃点100h(气体放电灯)和10h(白炽灯)后再测量其亮度。
(2)测量方法1)测量时,亮度计先用大量程档数,然后根据指示值的大小逐渐找到合适的档数,原则上不允许指示值在最大量程1/10范围内读数。
2)亮度示值稳定后再读数。数字式亮度计显示的读数,最后一位有时不稳定,应该记录出现次数较多的数字。
3)测量人员宜着深色服装,防止测量人员、围观者的身影对接收器的影响。
4)在测量中宜使电源电压保持稳定,在额定电压下测量;如果做不到,应测量电源电压,当与额定电压不符时,应按电压偏差对光通量的变化予以修正。
5)为提高测量的准确性,一个测点可取2~3次读数,然后取其平均值。
6)根据有关规定,测量时需要将亮度计的光探测器垂直向下定位于距路面1m左右的高度处并保持相对稳定。
(3)记录内容1)测量结果记录事先准备好的表格。
2)道路照明的测量记录道路照明测量记录内容如下:
①测量日期、时间、气候条件、测量人员姓名;②测量部位(包括城市、街道、路段名称);③光源和灯具的型号和规格;④灯具安装方式、间距、高度、仰角、悬挑长度;⑤测量现场条件(包括环境条件、供电条件等);⑥光源和灯具的使用时间、最近一次清洗日期;⑦标有尺寸的亮度测点布置图; ⑧各测点的亮度测量值;⑨平均亮度及亮度均匀度计算结果;⑩亮度计型号、编号、检定日期。
五、一种新型的道路照明的照度测量方案从本文所阐述的常规的道路照明的亮度测量方案中可以看出,无论是采用四点法还是采用中心法来靠人工进行逐点测量,均存在被测点数多、数据测量记录、处理工作量大的缺点,而且对已通车的道路来说进行测量还存在交通安全问题,为此本文在常规的道路照明的亮度测量方法的基础上提出了一种新型的亮度测量方法,经实践证明是切实可行的。
本方案是将具有记忆和存贮功能的XYL-Ⅲ全数字亮度计安置在高档电动遥控的履带式玩具装甲车(以下简称为测试小车)上,该测试小车的驱动系统受站在路边的测量者手中的遥控器和测试小车内安置的可编程控制器为主体的自动控制系统控制,当车内的自动控制系统启动时,装甲车将按照事先设定的动作程序沿如图9所示的箭头方向完成行走程序,并采用四点法在每个矩形网格的四角处自动完成亮度测量和记录,存贮任务,待全部程序结束后,测试小车在遥控器的操纵下自动返回测量者所在位置。遥控器的另一作用是在车内控制系统失灵的情况下,由测量者手动遥控完成全部测量过程,并在道路出现行驶车辆时紧急召回测试小车。
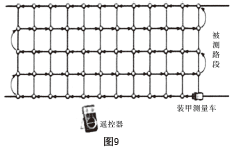
将常规的人工逐点测量法与全自动逐点测量法进行对比,全自动逐点测量法不仅有测量速度快、测量安全性好、减低劳动强度、数据处理方便的优点,更由于采用测试小车自动测量排除了测量人员在测试现场所引起的挡光、反光干扰,有效地提高了测试精度和数据采集的准确性。